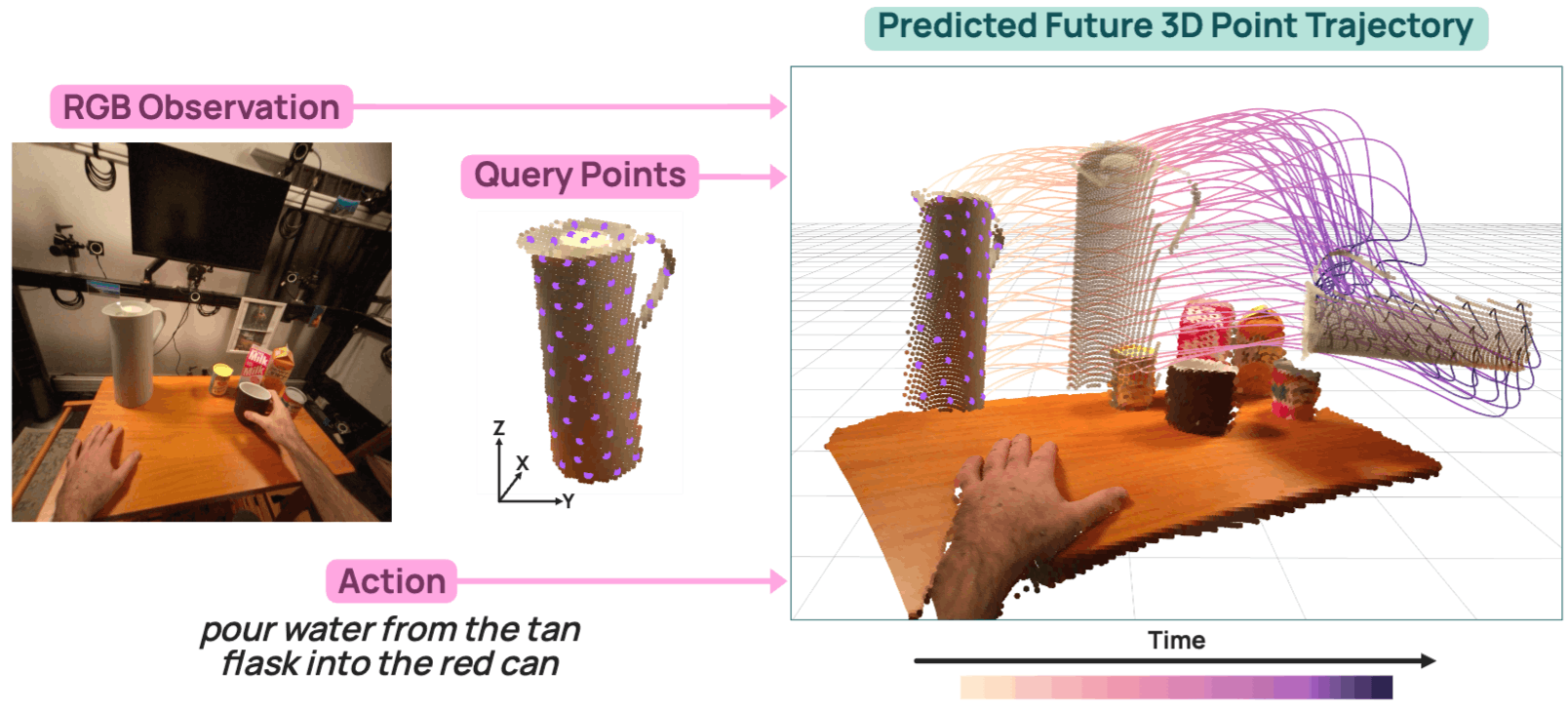
Why 3D Interaction Traces?
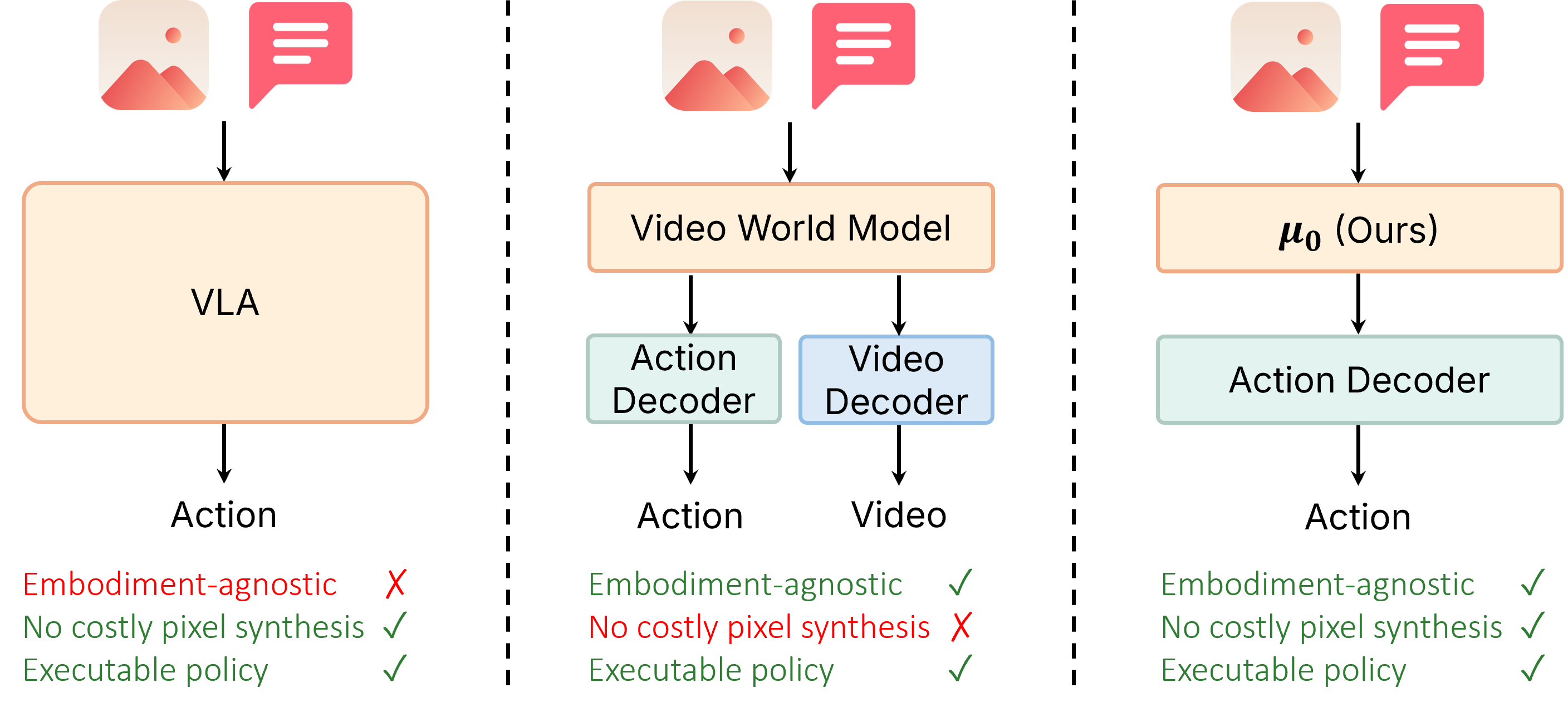
Pixel-space video models burn capacity on appearance, while action-labeled VLAs are bound to specific embodiments. μ0 occupies the middle ground: it predicts 3D traces of semantic interaction points — objects, tools, hands, and contact regions — that compactly describe what must move, regardless of the robot used.